
2020年09月14日(月)
HILSとは?
HILS(Hardware In the Loop Simulation)とは
HILSは、モデルベース開発と呼ばれるシミュレーションを活用した制御ソフトウェアのデバッグ手法の一つです。 実機コントローラに実装をされた制御ソフトウェア(ここではコントローラとします)のデバッグに用いられます。
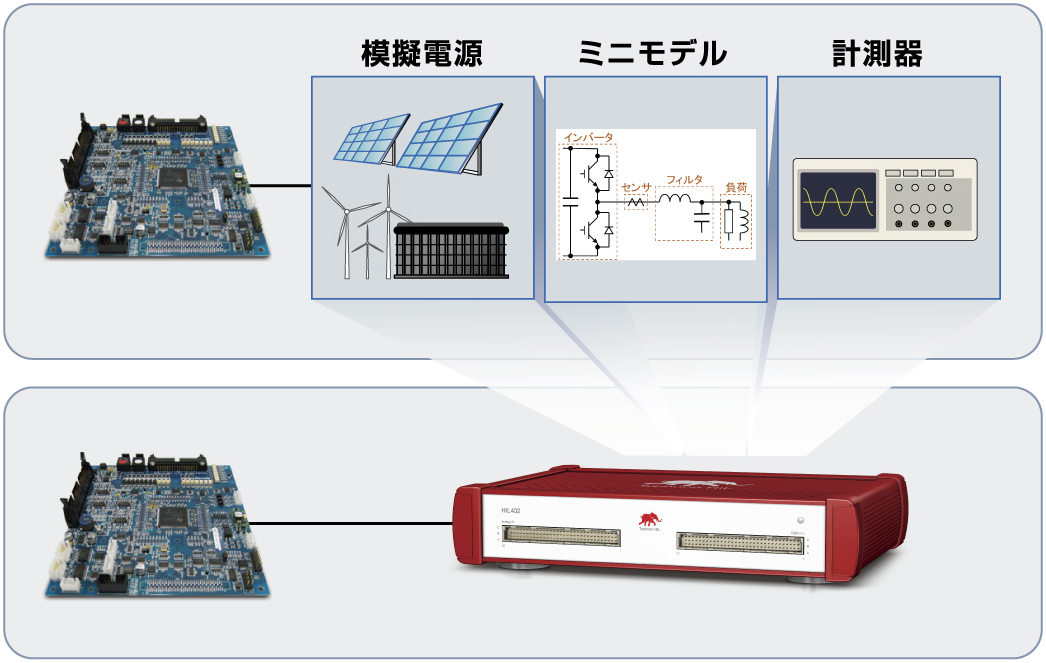
通常、コントローラのデバッグを行う際には、制御回路、電力系統・バッテリ・太陽電池を模擬する駆動用電源、パワーメータやオシロスコープといった計測器が必要となります。また、コントローラの制御対象となる設備(モーターやリアクトル、抵抗などの負荷)も準備しなければなりません。
HILSでは、これらの実機設備をリアルタイムシミュレーターを使って模擬します。リアルタイムシミュレーターはその名前の通り、実時間で動作するシミュレーターであり、信号の取り込みから演算結果の出力を設定されたタイムステップごとに実行し続けます。あたかも実機設備のように振舞い、実機が接続されているかのようなコントローラのデバッグ環境を提供します。 また、実機設備では条件設定や再現が難しい環境下でのデバッグも容易に行うことができます。
各制御対象はプラントモデルと呼ばれており、パソコン上で作成したプラントモデルをFPGAなどにダウンロードして模擬動作させます。近年のリアルタイムシミュレーターで使用されるFPGAの急速な高性能化・高機能化により、従来の機械要素や電力系統などの遅い時定数でのシミュレーションだけではなく、インバータやコンバータへの駆動信号(ゲート信号)などを超高速で取り込んで演算するなど、パワエレならではの早い時定数でのサンプリングや演算処理も実時間でシミュレーションできるようになってきました。
HILSの適用分野としては、自動車(EV/HEV)だけではなく、パワーコンディショナ、UPS、蓄電システム、鉄道、船舶、航空、エアコン、エレベーターなど、パワーエレクトロニクスを利用する多くの分野での利用が進んでいます。
HILSを導入するメリットは?
コントローラの開発・デバッグにおいて、こんな課題はありませんか?
・製品機種ごとに容量、電圧、電流、周波数、回転数や負荷条件が異なる。
ミニモデル、試験環境をその都度用意したり変更するのはコストが掛かる。
・FRTや単独運転検出、高調波の重畳や過負荷試験などを実環境で再現をするのは難しい。
機能検証や保護機能の開発をもっと簡単に実現したい。
・コントローラのデバッグには装置破損のリスクがあり、通電はいつも不安が付きまとう。
デバッグ中のソフトで破損が起こると、原因究明も含めて工程に大きな影響が出てしまう。
HILSはコントローラデバッグに必要な主回路・ミニモデル、系統模擬電源や太陽電池/バッテリ模擬電源、モータベンチや実負荷などをリアルタイムでシミュレーションします。 あたかも実機が繋がっているかのようにコントローラのデバッグを行う事ができ、 工数削減、費用低減、不安解消を実現します。
パワエレ用HILとはどういう意味?
TyphoonHILはパワエレ用HILと謳っていますが、”パワエレ用”とはどういう意味でしょうか?
理由は大きく2つあります。
まずはシミュレーションタイムステップの問題です。
HILの歴史は古く、フライトシミュレータや電力系統などでは1950年代ごろより使われていました。その後自動車においても使用されるようになり、1980年代にはECUのテストに使用するHILが開発されるようになります。 今では電力業界や自動車業界のように簡単に実物を作ってテストすることができない業界では必要不可欠なシステムとなりました。
少しずつ進化してきたHILですが、電力業界は50Hz,60Hzをベースとしており、自動車業界も機械部品を中心としていた頃には高い周波数の影響を考慮する必要がありません。 その結果、HILのシミュレーションタイムステップは高周波でスイッチングを繰り返すパワエレ業界の技術者にとって、十分なものとは言えませんでした。
しかし、電力業界や自動車業界は今やパワエレの技術を欠かすことはできません。 多くの産業でパワエレ技術が必要とされ、パワエレ技術の影響をシステムで考慮しないわけにはいかない背景があります。 TyphoonHILはパワエレ技術者によって開発されたため、20nsのオーバーサンプリングでゲート信号を取り込み、500nsのタイムステップによる演算処理を実現し、200kHz相当のキャリア周波数で駆動する 高速インバータもモデル化することができます。
2つ目の大きな問題は技術者不足です。
既出の通り、パワエレ技術は多くの産業で必要とされ、それ故に技術者不足が挙げられます。
パワエレ用ではないHILもFPGAを活用することでパワエレに対応させることも可能となっている場合も多いですが、パワエレ技術者でFPGAにも精通している必要があるとなると一気に難易度が上がってしまいます。
TyphoonHILはFPGAに精通していなくても、パワエレの回路と制御を書くことができれば使用できるようになっています。 これらのことから、パワエレ技術者が使いやすいようにと作られているため、「パワエレ用HIL」と謳っています。
HILSとHIL、正しいのはどちら?
HILSとHIL、2種類の呼び名がありますが、違いは何でしょうか?
HILSはHardware In the Loop Simulation(※)ということは 広く知られてきましたが、日本ではSimulationまで入れてHILSと呼ばれ、 欧米ではHILと呼ばれているようです。(※SimulationやSimulator、Systemなど諸説あります。)
Typhoon HILを開発するTyphoon HIL社はアメリカに本社がありますので、 弊社ではアメリカ式でHILと呼んでいます。
HILS ? SILS ? PILS ?
モデルベース開発においては、HILSの他にもPILSやSILSといったデバッグ手法があります。
コントローラーを実機にするかコンピューター上のモデルで表現するか、制御対象となるプラントモデルをリアルタイム(実時間)で駆動するかなどの違いがあります。
各開発手法に得手・不得手があり、開発フェーズや得たい結果などにより使い分けをして開発に取り入れられています。
| デバッグ手法 | コントローラ | 主回路制御対象 | 特徴 |
|---|---|---|---|
| HILS Hardware In the Loop Simulation |
実機コントローラ |
ハードウェア (リアルタイムシミュレータ) |
実時間でのデバックが可能 コントローラの演算時間や割り込みタイミングなども検証できます。 |
| PILS Processor In the Loop Simulation |
実機プロセッサ | 回路シミュレータ | 回路シミュレータ上で動作する主回路と実機プロセッサとを組み合わせたデバッグ方法。 実時間でのデバッグはできません。 |
| SILS Software In the Loop Simulation |
回路シミュレータ | 回路シミュレータ | シミュレーションのタイムステップ(時間分解能)を自由に設定できるため幅広い周波数域の解析及びデバッグが可能。 |