
Typhoon HILユーザー事例(モータ制御)
長岡技術科学大学
大石 潔教授、横倉 勇希准教授 、小林 勇斗さん、伊藤亮人さん
- Typhoon HIL
- インタビュー
長岡技術科学大学
モーションコントロール研究室
モーションコントロール研究室
大石 潔教授、横倉 勇希准教授
学生 小林 勇斗さん、伊藤亮人さん
回路シミュレータから実機検証への移行がHILSを使ってスムーズに
長岡技術科学大学 モーションコントロール研究室は、制御理論やロボット工学,パワーエレクトロニクスなどの
知識を駆使して様々な機器のモーションコントロールに関する研究を行っています。
HILSを研究で活用している大石先生と横倉先生、学生の小林さん、伊藤さんにインタビューを行いました。
-小林さんの研究内容を教えてください。
小林さん:
モータ駆動用次世代スイッチング制御技術の研究をしています。
インバータのスイッチング状態をキャリア比較変調でなく、直接制御することで平均スイッチング周波数を下げてインバータの効率を上げるのが目的です。
ただし平均スイッチング周波数を下げすぎると電流ひずみ率(THD)が悪くなるので、一定のTHDで平均スイッチング周波数を下げることを考えています。
平均スイッチング周波数と電流THDのトレードオフの問題を解決したいという内容です。
横倉先生:
後ほどお話ししますが、研究内容自体がスイッチをバチバチやるので、HILSがとても活用できます。

インタビューに答えていただいた小林 勇斗さん
-伊藤さんの研究内容を教えてください。
伊藤さん:
研究のテーマとしてはモータの内部温度推定で、例えばACサーボモータの磁石や巻き線の温度を測ることをテーマとしています。
その際に高周波電流を注入するための電流制御器も併せて提案しています。
電流制御器の動作確認でHILSを使っています。
横倉先生:
伊藤さんの研究では、実装している電流制御器がデュアル正弦波追従という特殊な制御を行っています。
※論文「PMSMのデュアル正弦波追従電流制御系によるロータ速度制御と高周波注入型巻線温度推定の同時実現の検討」
制御が特殊で、シミュレータからインバータへの移行が不安なためHILSを使って検証しています。

インタビューに答えていただいた伊藤亮人さん
HILSを使わなくても実験すればいいと思っていた
-HILSを使う前は、HILSというツールにどのような印象を持ってましたか。
小林さん:
私はMATLAB/SimulinkやPSIMなどのシミュレーションソフトと同じようなイメージを持っていました。
結局、最後は実機で試験を行う必要があるためソフトのシミュレータとHILSは正直あまり差が無いと思っていました。
大石先生:
最初はHILSなんか使わなくても実験をすればよいと思っていました。あったら便利かもくらいという感覚でした。
私以外にも同じことを思っている人は多いと思います。
-実際にTyphoon HILを使ってみて、印象はどのように変わりましたか。
小林さん:
実機のプログラムをそのまま試して、なおかつゲート信号までは実機と同様に試験が出来ます。
その点がパソコンの中で完結している回路シミュレータと大きな違いになってると思います。
ゲートを生成するまでの間のバグをHILSは見つけることができます。
また例えば実機で壊れるような動作(短絡など)をさせたときに、Typhoon HILだったら安全にテストが出来るという点でもすごい役に立っています。
伊藤さん:
実機の場合、過電流が流れると止まってしまうので、エラーの追及が出来ません。
そのため実機では過電流の原因特定は難しいですが、HILSでは順を追って何回も試せるのはすごい便利だと感じています。
大石先生:
回路シミュレータはあくまでパソコン上のシミュレーションなので問題なく動作しますが、実際に実験を行ったら動かないというのはよくあります。
Typhoon HILは動かない際に細かいところまでエラーを追えるのはありがたいです。
使ってみて費用対効果が実感できました。
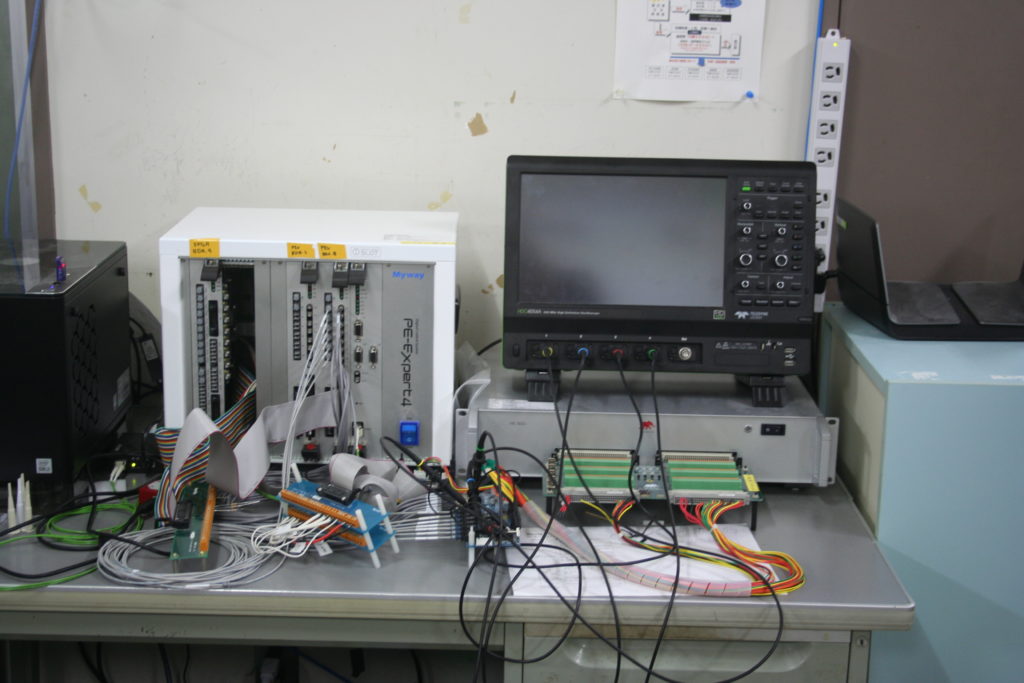
研究室のHILSのデバッグ環境
コントローラ(PE-Expert4)とTyphoon HILを接続し検証
実際に使ってみて回路シミュレータとHILSは全くの別物と実感
-小林さんは、回路シミュレータから実機への移行の間にHILS検証を入れることでどのようなことが変わりましたか?
小林さん:
一番は、回路シミュレータから実機への移行がスムーズになりました。
大石先生:
HILSを導入してからは、HILSで動いたらあとは実験結果という形に、パシっと割り切ることが出来ました。
小林さん、もしTyphoon HILが無かったら今の研究はどうですか。
小林さん:
ゲート生成のアルゴリズムを自作しているため、HILSが無かったら相当難航していると思います。
仮にTyphoon HILが無くなったら、実機で実験をするしかないので、
実機でのデバッグ作業が増えますし色んな条件でテストが出来なくなるという点でも困るかと思います。
いきなり試験を行うため、恐る恐る試験を行うと思います。
-伊藤さんは、HILS検証をすることでどのようなことが変わりましたか?
伊藤さん:
電流制御で電流サンプリングのタイミングの実装をちょっと変更するだけで1サンプル遅れたりします。
そのまま実機で実験を行うと制御が発散してしまったりしてしまうため、それが怖くてHILSを使ってみたということがあります。
制御はシミュレーションでも出来ますが、実装を含めて動作するかはHILSでないと分からないと思います。
-その他に回路シミュレータとHILSはどのような点が違いますか?
小林さん:
実機に近い形でバグを確認できるので、ソフトで完結している回路シミュレータとHILSは明確に違うと分かりました。
HILSでの検証の際に演算時間が長すぎてコントローラ側が止まるという現象が何回かあったので、それが実機での実験前に分かって良かったと思います。
-最後にTyphoon HILを使ってみた感想を一言ずつおねがいします。
小林さん:実装のテストがラクになりました。すぐに実験出来るのが良かったです。
伊藤さん:試行錯誤のループを早く回せるようになりました。
横倉先生:まずは考えるよりHILSを使って手を動かしてみろと言えるようになりました。
大石先生:失敗を恐れずにテストができるので、学生さんに積極的に試させることが出来るようになりました。結果、実験が進むので私がいらいらする機会も減りました (笑)。
今回インタビューにご協力いただきました長岡技術科学大学モーションコントロール研究室のHPは下記ロゴをクリックしてご覧ください。

大石 潔教授、横倉 勇希准教授
小林 勇斗さん、伊藤亮人さん
ありがとうございました!
インタビュー:2022年11月実施
インタビュアー 酒井 洋二